Randomized Maximum Likelihood Solver
This notebook demonstrates the use of the Randomized Maximum Likelihood Solver (RML) implemented in the Pastas-Plugins package. It compares three groundwater model calibration approaches:
Least Squares (LS)
RML with finite-difference (2-point) Jacobian
RML with empirical Jacobian
The workflow includes generating synthetic observations, defining the Pastas model structure, running calibrations, generating parameter ensembles, and comparing confidence intervals and simulations.
Setup
Packages
The notebook imports numerical and hydrological modeling packages:
import warnings
from typing import Literal
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
import pastas as ps
from pastas_plugins.pest.solver import RandomizedMaximumLikelihoodSolver
ps.set_log_level("DEBUG")
warnings.filterwarnings("ignore", category=DeprecationWarning)
/home/docs/checkouts/readthedocs.org/user_builds/pastas-plugins/envs/latest/lib/python3.11/site-packages/tqdm/auto.py:21: TqdmWarning: IProgress not found. Please update jupyter and ipywidgets. See https://ipywidgets.readthedocs.io/en/stable/user_install.html
Data
The notebook loads the Wagna dataset and extracts evaporation and precipitation. These serve as input stresses for the RechargeModel.
df = ps.load_dataset("collenteur_2021")["wagna"]
evap = df["evaporation [mm/d]"].rename("evaporation").dropna()
prec = df["precipitation [mm/d]"].rename("precipitation").loc[evap.index]
Helper functions
Some helper functions to quickly setup models and synthetic series
def get_model(obs: pd.Series) -> ps.Model:
"""Creates a standard Pastas model template.
Adds a RechargeModel with a Gamma response function.
Parameters
----------
obs : pd.Series
Observations series for the model.
Returns
-------
ps.Model
The model with RechargeModel and noise model configured.
"""
ml = ps.Model(obs, name="synthetic_model")
sms = []
rm = ps.RechargeModel(
prec=prec,
evap=evap,
rfunc=ps.Gamma(),
name="rch",
)
sms.append(rm)
ml.add_stressmodel(sms)
ml.initialize()
ml.set_parameter(
"constant_d",
pmin=obs.mean() - 4 * obs.std(),
pmax=obs.mean() + 4 * obs.std(),
)
ml.set_parameter(name="rch_a", initial=100.0)
return ml
def create_synthetic_series(
noise_std: float = 0.0, freq: Literal["D", "14D"] = "D"
) -> pd.Series:
"""Generates a synthetic groundwater head time series.
Builds a model with known parameters, simulates the head time series,
adds Gaussian noise, and resamples to the chosen frequency.
Parameters
----------
noise_std : float, optional
Standard deviation of Gaussian noise to add to observations, by default 0.0
freq : Literal["D", "14D"], optional
Resampling frequency ("D" for daily, "14D" for 14-day), by default "D"
Returns
-------
pd.Series
Synthetic groundwater head observations with realistic but controlled values.
"""
date_range = pd.date_range(tmin, tmax, freq="D")
obs = pd.Series(0.0, index=date_range, name="head_obs")
ml = get_model(obs)
ml.set_parameter("rch_A", initial=rch_A, move_bounds=True)
ml.set_parameter("rch_n", initial=rch_n, move_bounds=True)
ml.set_parameter("rch_a", initial=rch_a, move_bounds=True)
ml.set_parameter("rch_f", initial=rch_f, move_bounds=True)
ml.set_parameter("constant_d", initial=constant_d, move_bounds=True)
sim = ml.simulate(tmin=tmin, tmax=tmax)
if noise_std > 0.0:
noise = np.random.default_rng(seed=42).normal(0, noise_std, len(sim))
sim += noise
sim = ps.timeseries_utils.pandas_equidistant_sample(sim, freq=freq)
return sim
Constants
A number of synthetic constants (e.g., rch_A, rch_n, etc.) define the “true” parameters used later in the synthetic model generation.
constant_d = 5.0
rch_A = 0.5
rch_n = 1.1
rch_a = 250.0
rch_f = -0.8
tmin = pd.Timestamp("1980-01-01")
tmax = pd.Timestamp("2019-12-31")
noise_std = 0.025
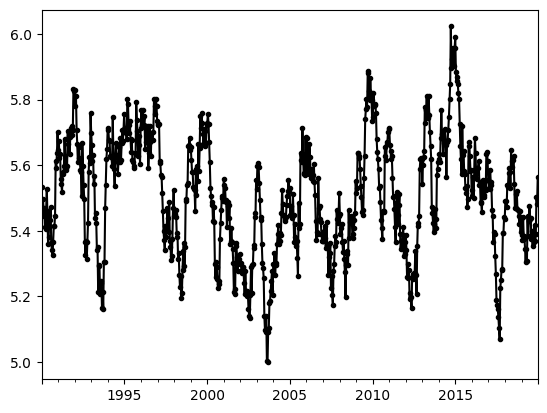
Create a synthetic head series
head = create_synthetic_series(noise_std=noise_std, freq="14D")
head = head.loc[pd.Timestamp("1990-01-01") : tmax]
head.plot(marker=".", color="k")
Model is not optimized yet, initial parameters are used.
<Axes: >
Models
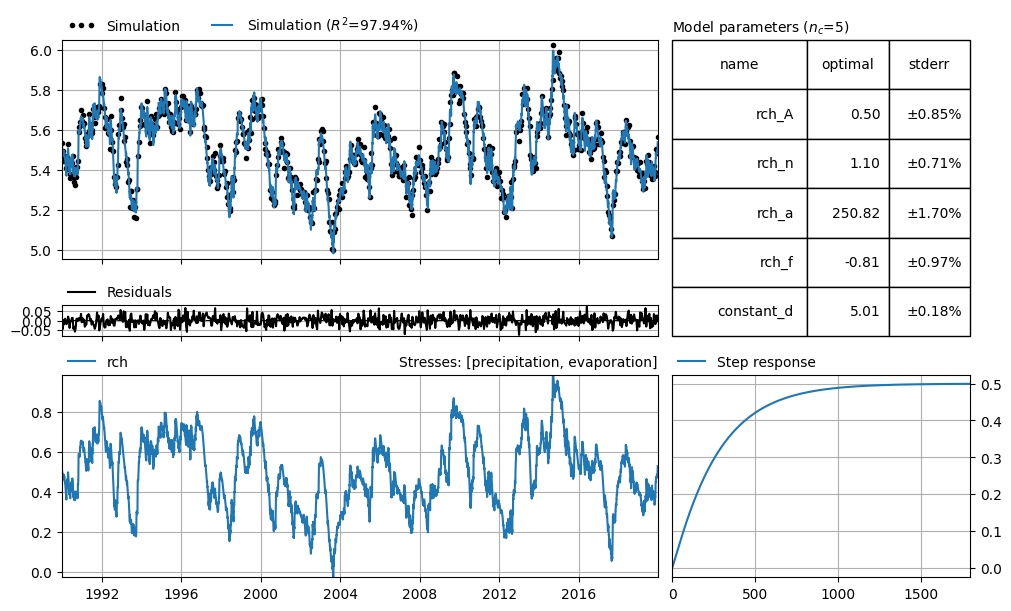
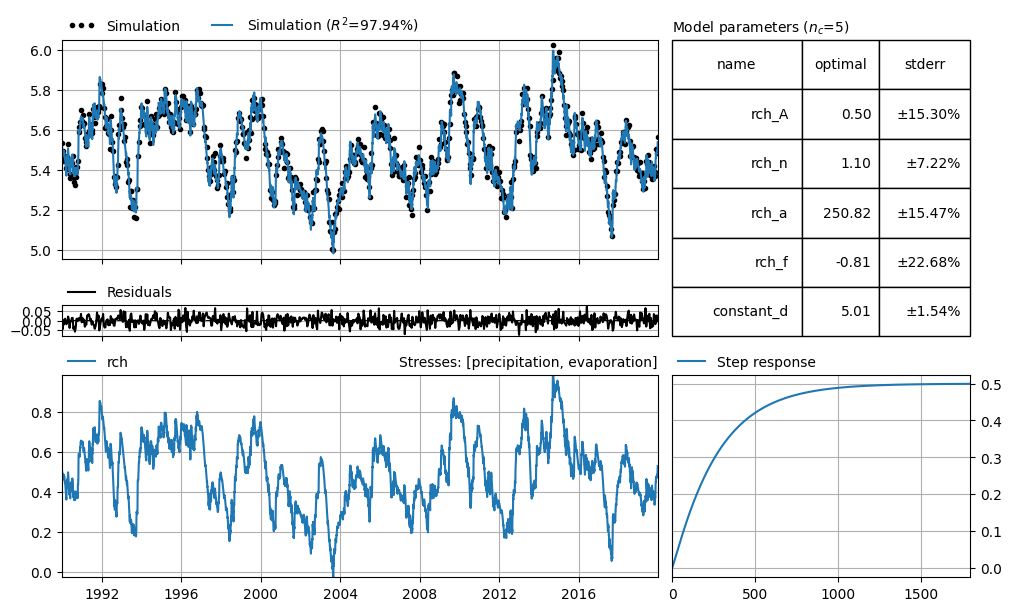
Least Squares
A Pastas model (ml_ls) is calibrated with standard least-squares optimization to show as a baseline model to compare the RML uncertainty estimates.
ml_ls = get_model(head)
ml_ls.solve()
axd = ml_ls.plots.results_mosaic(stderr=True)
DEBUG:pastas.model:[Errno 6] No such device or address
DEBUG:pastas.model:Adding LeastSquares as default solver.
Fit report synthetic_model Fit Statistics
==================================================
nfev 13 EVP 97.94
nobs 783 R2 0.98
noise False RMSE 0.03
tmin 1990-01-02 00:00:00 AICc -5762.22
tmax 2019-12-24 00:00:00 BIC -5738.98
freq D Obj 0.25
freq_obs None ___
warmup 3650 days 00:00:00 Interp. No
solver LeastSquares weights Yes
Parameters (5 optimized)
==================================================
optimal initial vary
rch_A 0.499871 0.146585 True
rch_n 1.098129 1.000000 True
rch_a 250.819346 100.000000 True
rch_f -0.807632 -1.000000 True
constant_d 5.008214 5.505771 True
RML with finite difference jacobian
In this section we build a model using the Randomized Maximum Likelihood (RML) approach. We apply parameter bounds to constant_d and instantiate the RandomizedMaximumLikelihoodSolver with:
250 realizations, forming the RML parameter ensemble
A three-point finite-difference Jacobian
This means each realization performs its own independent optimization starting from its individually drawn initial parameter set.
Each realization computes its own finite-difference Jacobian, just like the standard Pastas least-squares solver.
During solver.initialize(), several important steps occur:
The standard deviation of the observation noise is set via
standard_deviation=noise_std. This creates a unique synthetic observation series for each ensemble member, representing uncertainty in the measurement data.The arguments
method="norm"andpar_sigma_range=4.0define how the initial parameter values for each realization are sampled:method="norm"→ initial parameters are drawn from a normal distributionpar_sigma_range=4.0→ the parameter bounds (pmin, pmax) are interpreted as ±4 standard deviations of this distribution
Together, these settings define the prior parameter ensemble, from which each realization begins its optimization before contributing to the final RML posterior ensemble.
# test finite difference jacobian
ml_rml = get_model(head)
solver = RandomizedMaximumLikelihoodSolver(
num_reals=250,
jacobian_method="2-point", # other option is 3-point which is slower but more accurate for the jacobian
# num_workers= # if you want to do stuff in parallel, by default yes. if not set num_workers to 1.
beta=0.0, # weighting factor between prior and observation residuals
minimize_method="SLSQP", # other options are "trust-constr", "L-BFGS-B" and "TNC"
noptmax=1000,
)
ml_rml.add_solver(solver)
ml_rml.solver.initialize(
standard_deviation=noise_std,
method="norm",
par_sigma_range=4.0,
)
DEBUG:pastas.model:[Errno 6] No such device or address
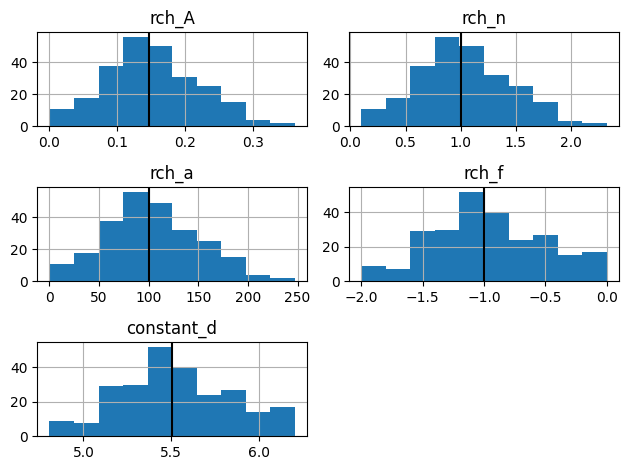
Let’s have a look at the prior parameter ensemble.
axes = ml_rml.solver.parameter_ensemble_prior.hist(bins=10)
for ax in axes.ravel():
title = ax.get_title()
if title != "":
ax.axvline(ml_rml.parameters.at[title, "initial"], color="k", label="initial")
plt.tight_layout()
The observation_noise is stored under the solver.observation_noise:
solver.observation_noise.head()
| 0 | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 | ... | 240 | 241 | 242 | 243 | 244 | 245 | 246 | 247 | 248 | base | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1990-01-02 | 0.006134 | 0.013955 | 0.013881 | 0.004524 | 0.048632 | 0.029283 | 0.071084 | 0.031424 | 0.035165 | -0.034352 | ... | 0.013375 | 0.054584 | -0.004218 | -0.045778 | 0.059480 | 0.034920 | 0.000397 | -0.004454 | -0.028481 | 0.0 |
| 1990-01-16 | -0.014197 | -0.008229 | 0.019937 | -0.012047 | -0.006529 | 0.040086 | 0.015138 | 0.013051 | 0.008746 | 0.020920 | ... | -0.000361 | -0.031685 | 0.022145 | 0.014614 | 0.010912 | -0.025800 | -0.030544 | 0.032909 | -0.039762 | 0.0 |
| 1990-01-30 | 0.019058 | -0.010101 | -0.010682 | 0.012991 | -0.017553 | 0.002911 | -0.000692 | 0.010395 | -0.029478 | 0.031204 | ... | -0.001924 | -0.030718 | -0.003169 | 0.048684 | -0.035050 | -0.037988 | 0.002104 | -0.024062 | -0.019232 | 0.0 |
| 1990-02-13 | 0.004715 | -0.020735 | 0.034227 | 0.020423 | -0.029738 | 0.001357 | 0.017137 | -0.021774 | -0.006873 | 0.013100 | ... | -0.022094 | 0.024990 | -0.014745 | 0.008126 | 0.019464 | 0.025633 | -0.016064 | 0.014447 | 0.024804 | 0.0 |
| 1990-02-27 | 0.036680 | 0.001687 | -0.004078 | -0.023111 | 0.011612 | -0.007555 | 0.001709 | -0.031365 | 0.025758 | 0.006708 | ... | 0.038635 | -0.029654 | 0.017224 | -0.017976 | 0.029786 | 0.024733 | -0.015048 | 0.017223 | 0.009537 | 0.0 |
5 rows × 250 columns
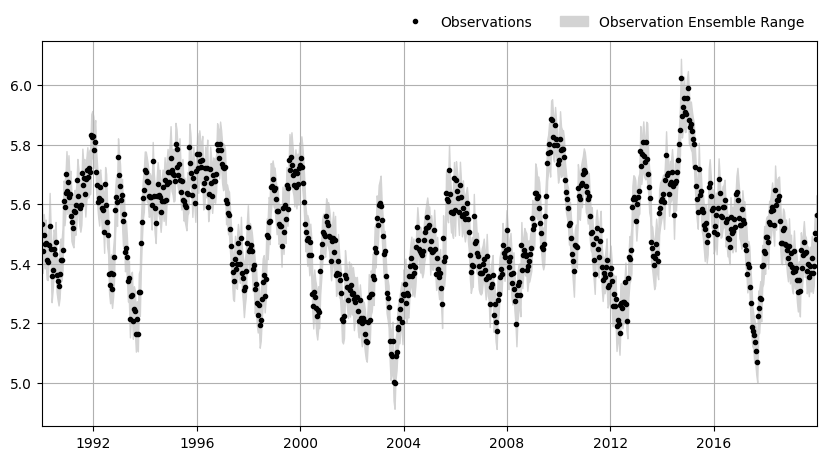
Together with the ml.observations() the observation_noise forms the solver.observation_ensemble on which each ensemble is fitted.
f, ax = plt.subplots(figsize=(10, 5))
ax.plot(
ml_rml.observations().index,
ml_rml.observations().values,
"k.",
label="Observations",
)
ax.fill_between(
ml_rml.solver.observation_ensemble.index,
ml_rml.solver.observation_ensemble.min(axis=1),
ml_rml.solver.observation_ensemble.max(axis=1),
color="lightgrey",
label="Observation Ensemble Range",
)
ax.set_xlim(ml_rml.observations().index.min(), ml_rml.observations().index.max())
ax.grid(True)
ax.legend(loc="lower right", bbox_to_anchor=(1.0, 1.0), ncol=2, frameon=False)
<matplotlib.legend.Legend at 0x73dc0e5cc810>
Let’s solve this. It might take up to a minute if it is done in parallel.
ml_rml.solve(report=True, initalize=False)
ERROR:pastas_plugins.pest.solver:Unexpected keyword arguments: ['initalize'], to solve method. These kwargs will be ignored for now. See issue https://github.com/pastas/pastas/pull/1031.
RML looping over realizations: 0%| | 0/250 [00:00<?, ?it/s]
RML looping over realizations: 0%| | 1/250 [00:00<02:10, 1.91it/s]
RML looping over realizations: 1%| | 2/250 [00:00<01:40, 2.46it/s]
RML looping over realizations: 1%| | 3/250 [00:01<01:47, 2.30it/s]
RML looping over realizations: 2%|▏ | 4/250 [00:01<01:24, 2.92it/s]
RML looping over realizations: 2%|▏ | 5/250 [00:01<01:20, 3.06it/s]
RML looping over realizations: 2%|▏ | 6/250 [00:02<01:16, 3.21it/s]
RML looping over realizations: 3%|▎ | 7/250 [00:02<01:05, 3.71it/s]
RML looping over realizations: 3%|▎ | 8/250 [00:02<01:17, 3.12it/s]
RML looping over realizations: 4%|▎ | 9/250 [00:03<01:20, 2.98it/s]
RML looping over realizations: 4%|▍ | 10/250 [00:03<01:04, 3.71it/s]
RML looping over realizations: 4%|▍ | 11/250 [00:03<01:21, 2.93it/s]
RML looping over realizations: 5%|▍ | 12/250 [00:03<01:07, 3.55it/s]
RML looping over realizations: 5%|▌ | 13/250 [00:04<01:25, 2.78it/s]
RML looping over realizations: 6%|▌ | 14/250 [00:04<01:13, 3.23it/s]
RML looping over realizations: 6%|▌ | 15/250 [00:05<01:22, 2.85it/s]
RML looping over realizations: 7%|▋ | 17/250 [00:05<01:17, 3.02it/s]
RML looping over realizations: 8%|▊ | 19/250 [00:06<01:08, 3.38it/s]
RML looping over realizations: 8%|▊ | 21/250 [00:06<00:51, 4.41it/s]
RML looping over realizations: 9%|▉ | 22/250 [00:06<00:55, 4.08it/s]
RML looping over realizations: 9%|▉ | 23/250 [00:07<01:00, 3.74it/s]
RML looping over realizations: 10%|▉ | 24/250 [00:07<00:55, 4.05it/s]
RML looping over realizations: 10%|█ | 25/250 [00:07<00:59, 3.79it/s]
RML looping over realizations: 10%|█ | 26/250 [00:07<00:55, 4.07it/s]
RML looping over realizations: 11%|█ | 27/250 [00:08<01:01, 3.60it/s]
RML looping over realizations: 11%|█ | 28/250 [00:08<00:52, 4.25it/s]
RML looping over realizations: 12%|█▏ | 29/250 [00:08<00:56, 3.89it/s]
RML looping over realizations: 12%|█▏ | 30/250 [00:08<00:51, 4.25it/s]
RML looping over realizations: 12%|█▏ | 31/250 [00:09<01:00, 3.64it/s]
RML looping over realizations: 13%|█▎ | 32/250 [00:09<00:51, 4.22it/s]
RML looping over realizations: 13%|█▎ | 33/250 [00:09<00:55, 3.88it/s]
RML looping over realizations: 14%|█▎ | 34/250 [00:09<00:55, 3.90it/s]
RML looping over realizations: 14%|█▍ | 35/250 [00:10<00:54, 3.94it/s]
RML looping over realizations: 14%|█▍ | 36/250 [00:10<00:58, 3.64it/s]
RML looping over realizations: 15%|█▍ | 37/250 [00:10<00:53, 3.98it/s]
RML looping over realizations: 15%|█▌ | 38/250 [00:10<01:00, 3.49it/s]
RML looping over realizations: 16%|█▌ | 39/250 [00:11<00:55, 3.78it/s]
RML looping over realizations: 16%|█▌ | 40/250 [00:11<01:10, 2.99it/s]
RML looping over realizations: 16%|█▋ | 41/250 [00:11<00:59, 3.51it/s]
RML looping over realizations: 17%|█▋ | 42/250 [00:12<01:15, 2.75it/s]
RML looping over realizations: 17%|█▋ | 43/250 [00:12<01:05, 3.14it/s]
RML looping over realizations: 18%|█▊ | 44/250 [00:12<01:00, 3.39it/s]
RML looping over realizations: 18%|█▊ | 45/250 [00:13<01:07, 3.02it/s]
RML looping over realizations: 19%|█▉ | 47/250 [00:13<00:58, 3.49it/s]
RML looping over realizations: 19%|█▉ | 48/250 [00:13<00:52, 3.86it/s]
RML looping over realizations: 20%|█▉ | 49/250 [00:14<01:02, 3.22it/s]
RML looping over realizations: 20%|██ | 51/250 [00:14<01:01, 3.22it/s]
RML looping over realizations: 21%|██ | 53/250 [00:15<00:52, 3.72it/s]
RML looping over realizations: 22%|██▏ | 54/250 [00:15<00:50, 3.90it/s]
RML looping over realizations: 22%|██▏ | 55/250 [00:15<00:57, 3.39it/s]
RML looping over realizations: 23%|██▎ | 57/250 [00:16<00:58, 3.33it/s]
RML looping over realizations: 24%|██▎ | 59/250 [00:17<01:01, 3.12it/s]
RML looping over realizations: 24%|██▍ | 61/250 [00:17<00:43, 4.35it/s]
RML looping over realizations: 25%|██▍ | 62/250 [00:17<00:48, 3.88it/s]
RML looping over realizations: 25%|██▌ | 63/250 [00:17<00:44, 4.18it/s]
RML looping over realizations: 26%|██▌ | 64/250 [00:18<00:54, 3.40it/s]
RML looping over realizations: 26%|██▌ | 65/250 [00:18<00:53, 3.48it/s]
RML looping over realizations: 26%|██▋ | 66/250 [00:18<00:52, 3.53it/s]
RML looping over realizations: 27%|██▋ | 67/250 [00:19<00:57, 3.16it/s]
RML looping over realizations: 27%|██▋ | 68/250 [00:19<00:54, 3.33it/s]
RML looping over realizations: 28%|██▊ | 69/250 [00:19<00:56, 3.20it/s]
RML looping over realizations: 28%|██▊ | 70/250 [00:20<00:56, 3.16it/s]
RML looping over realizations: 28%|██▊ | 71/250 [00:20<00:45, 3.91it/s]
RML looping over realizations: 29%|██▉ | 72/250 [00:20<01:00, 2.95it/s]
RML looping over realizations: 30%|██▉ | 74/250 [00:21<00:52, 3.38it/s]
RML looping over realizations: 30%|███ | 75/250 [00:21<00:43, 4.01it/s]
RML looping over realizations: 30%|███ | 76/250 [00:22<00:57, 3.01it/s]
RML looping over realizations: 31%|███ | 78/250 [00:22<00:52, 3.30it/s]
RML looping over realizations: 32%|███▏ | 79/250 [00:22<00:49, 3.45it/s]
RML looping over realizations: 32%|███▏ | 80/250 [00:23<00:50, 3.38it/s]
RML looping over realizations: 32%|███▏ | 81/250 [00:23<00:42, 3.93it/s]
RML looping over realizations: 33%|███▎ | 82/250 [00:23<00:50, 3.36it/s]
RML looping over realizations: 33%|███▎ | 83/250 [00:24<00:53, 3.13it/s]
RML looping over realizations: 34%|███▎ | 84/250 [00:24<00:43, 3.81it/s]
RML looping over realizations: 34%|███▍ | 85/250 [00:24<00:51, 3.23it/s]
RML looping over realizations: 35%|███▍ | 87/250 [00:24<00:40, 3.99it/s]
RML looping over realizations: 35%|███▌ | 88/250 [00:25<00:35, 4.56it/s]
RML looping over realizations: 36%|███▌ | 89/250 [00:25<00:43, 3.67it/s]
RML looping over realizations: 36%|███▌ | 90/250 [00:25<00:37, 4.31it/s]
RML looping over realizations: 36%|███▋ | 91/250 [00:26<00:50, 3.17it/s]
RML looping over realizations: 37%|███▋ | 93/250 [00:26<00:41, 3.79it/s]
RML looping over realizations: 38%|███▊ | 95/250 [00:27<00:39, 3.90it/s]
RML looping over realizations: 39%|███▉ | 97/250 [00:27<00:40, 3.81it/s]
RML looping over realizations: 40%|███▉ | 99/250 [00:28<00:38, 3.89it/s]
RML looping over realizations: 40%|████ | 101/250 [00:28<00:41, 3.60it/s]
RML looping over realizations: 41%|████ | 103/250 [00:29<00:37, 3.91it/s]
RML looping over realizations: 42%|████▏ | 104/250 [00:29<00:38, 3.84it/s]
RML looping over realizations: 42%|████▏ | 105/250 [00:29<00:38, 3.80it/s]
RML looping over realizations: 42%|████▏ | 105/250 [00:29<00:41, 3.53it/s]
---------------------------------------------------------------------------
KeyboardInterrupt Traceback (most recent call last)
Cell In[11], line 1
----> 1 ml_rml.solve(report=True, initalize=False)
File ~/checkouts/readthedocs.org/user_builds/pastas-plugins/envs/latest/lib/python3.11/site-packages/pastas/model.py:1017, in Model.solve(self, tmin, tmax, freq, warmup, noise, solver, report, initial, weights, fit_constant, freq_obs, initialize, **kwargs)
1014 self.add_solver(solver=solver)
1016 # Solve model
-> 1017 success, optimal, stderr = self.solver.solve(
1018 noise=self._settings["noise"], weights=weights, **kwargs
1019 )
1020 if not success:
1021 logger.warning("Model parameters could not be estimated well.")
File ~/checkouts/readthedocs.org/user_builds/pastas-plugins/envs/latest/lib/python3.11/site-packages/pastas_plugins/pest/solver.py:1769, in RandomizedMaximumLikelihoodSolver.solve(self, **kwargs)
1755 if self.jacobian_method in ("2-point", "3-point"):
1756 func = partial(
1757 RandomizedMaximumLikelihoodSolver._least_squares_fd,
1758 parameter_ensemble=self.parameter_ensemble,
(...) 1766 noptmax=self.noptmax,
1767 )
-> 1769 results = process_map(
1770 func,
1771 range(self.num_reals),
1772 max_workers=self.num_workers,
1773 desc="RML looping over realizations",
1774 chunksize=1,
1775 )
1776 # Concatenate all parameter iterations with proper MultiIndex structure
1777 parameter_iterations = pd.concat(
1778 [r.parameter_iterations for r in results],
1779 keys=[r.real for r in results],
1780 names=["real", "iteration"],
1781 )
File ~/checkouts/readthedocs.org/user_builds/pastas-plugins/envs/latest/lib/python3.11/site-packages/tqdm/contrib/concurrent.py:105, in process_map(fn, *iterables, **tqdm_kwargs)
103 tqdm_kwargs = tqdm_kwargs.copy()
104 tqdm_kwargs["lock_name"] = "mp_lock"
--> 105 return _executor_map(ProcessPoolExecutor, fn, *iterables, **tqdm_kwargs)
File ~/checkouts/readthedocs.org/user_builds/pastas-plugins/envs/latest/lib/python3.11/site-packages/tqdm/contrib/concurrent.py:51, in _executor_map(PoolExecutor, fn, *iterables, **tqdm_kwargs)
47 with ensure_lock(tqdm_class, lock_name=lock_name) as lk:
48 # share lock in case workers are already using `tqdm`
49 with PoolExecutor(max_workers=max_workers, initializer=tqdm_class.set_lock,
50 initargs=(lk,)) as ex:
---> 51 return list(tqdm_class(ex.map(fn, *iterables, chunksize=chunksize), **kwargs))
File ~/checkouts/readthedocs.org/user_builds/pastas-plugins/envs/latest/lib/python3.11/site-packages/tqdm/std.py:1181, in tqdm.__iter__(self)
1178 time = self._time
1180 try:
-> 1181 for obj in iterable:
1182 yield obj
1183 # Update and possibly print the progressbar.
1184 # Note: does not call self.update(1) for speed optimisation.
File ~/.asdf/installs/python/3.11.12/lib/python3.11/concurrent/futures/process.py:620, in _chain_from_iterable_of_lists(iterable)
614 def _chain_from_iterable_of_lists(iterable):
615 """
616 Specialized implementation of itertools.chain.from_iterable.
617 Each item in *iterable* should be a list. This function is
618 careful not to keep references to yielded objects.
619 """
--> 620 for element in iterable:
621 element.reverse()
622 while element:
File ~/.asdf/installs/python/3.11.12/lib/python3.11/concurrent/futures/_base.py:619, in Executor.map.<locals>.result_iterator()
616 while fs:
617 # Careful not to keep a reference to the popped future
618 if timeout is None:
--> 619 yield _result_or_cancel(fs.pop())
620 else:
621 yield _result_or_cancel(fs.pop(), end_time - time.monotonic())
File ~/.asdf/installs/python/3.11.12/lib/python3.11/concurrent/futures/_base.py:317, in _result_or_cancel(***failed resolving arguments***)
315 try:
316 try:
--> 317 return fut.result(timeout)
318 finally:
319 fut.cancel()
File ~/.asdf/installs/python/3.11.12/lib/python3.11/concurrent/futures/_base.py:451, in Future.result(self, timeout)
448 elif self._state == FINISHED:
449 return self.__get_result()
--> 451 self._condition.wait(timeout)
453 if self._state in [CANCELLED, CANCELLED_AND_NOTIFIED]:
454 raise CancelledError()
File ~/.asdf/installs/python/3.11.12/lib/python3.11/threading.py:327, in Condition.wait(self, timeout)
325 try: # restore state no matter what (e.g., KeyboardInterrupt)
326 if timeout is None:
--> 327 waiter.acquire()
328 gotit = True
329 else:
KeyboardInterrupt:
_ = ml_rml.plots.results_mosaic(stderr=True)
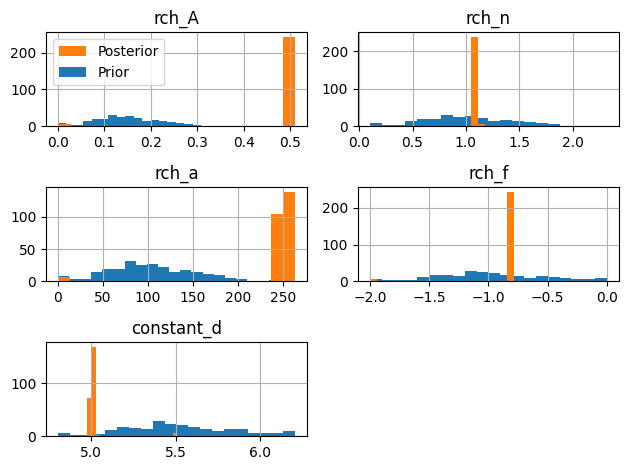
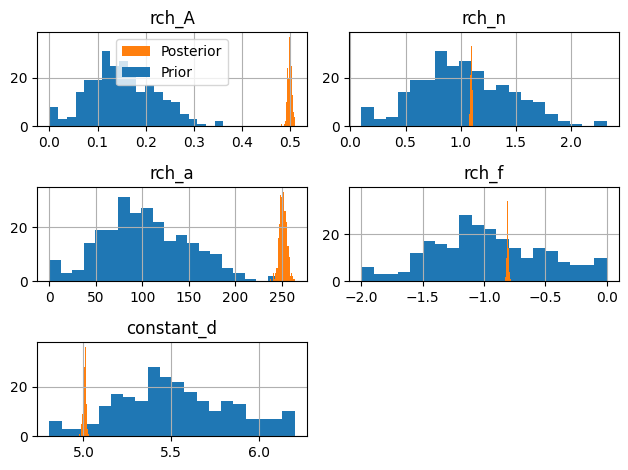
Lets look at the posterior parameter distribution. As you can see the prior is sometimes pretty far away from the posterior. That has to do with how we sample the parameters. Pastas guesses a starting value for pmin, pmax and initial for each parameter (excluding constant_d). If dist= norm then the bounds are sampled as a normal distribution where min(initial-pmin, pmax-initial) is 2 times the standard deviation (par_sigma_range=4.0). This means that if initial is not halfway between pmin and pmax the full extent of the original parameter bounds of Pastas are not sampled. I’m also not sure if I’m fully allowed to call it the posterior.
axes = ml_rml.solver.parameter_ensemble_posterior.hist(bins=20, color="C1")
for i, ax in enumerate(axes.ravel()[:-1]):
ml_rml.solver.parameter_ensemble_prior.iloc[:, [i]].hist(
bins=20, ax=ax, zorder=0, color="C0"
)
axes[0, 0].legend(["Posterior", "Prior"])
plt.tight_layout()
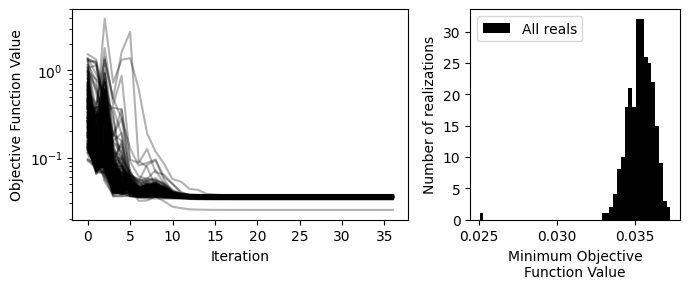
We can also see that some of the posterior values are at bounds or other places. We can have a look at the convergence of realizations and the objective function value.
convergence_rml = ml_rml.solver.convergence_ensemble
print(convergence_rml.value_counts())
converged
True 250
Name: count, dtype: int64
According to SciPy, all realizations converged. If they did not converge (try minimize_method="TNC" for instance), we can get rid of those.
objfuncs_rml = ml_rml.solver.obj_func_ensemble.unstack().loc[convergence_rml].T
min_per_real = (
ml_rml.solver.obj_func_ensemble.groupby("real").min().loc[convergence_rml]
)
bad_fit_reals = min_per_real[min_per_real > 10.0].index
good_fit_reals = min_per_real[min_per_real <= 10.0].index
f, axd = plt.subplot_mosaic(
[["iter", "hist"]], figsize=(7.0, 3.0), layout="tight", width_ratios=[1.6, 1]
)
axd["iter"].plot(objfuncs_rml.index, objfuncs_rml.values, "-", color="k", alpha=0.3)
axd["iter"].plot(
objfuncs_rml.loc[:, bad_fit_reals].index,
objfuncs_rml.loc[:, bad_fit_reals].values,
"-",
color="C1",
alpha=0.7,
)
axd["iter"].semilogy()
axd["iter"].set_xlabel("Iteration")
axd["iter"].set_ylabel("Objective Function Value")
_, bins, _ = axd["hist"].hist(min_per_real, bins=50, color="k", label="All reals")
axd["hist"].hist(
min_per_real.loc[bad_fit_reals],
bins=bins,
color="C1",
label="Reals with bad fits",
alpha=0.5,
)
axd["hist"].set_xlabel("Minimum Objective\nFunction Value")
axd["hist"].set_ylabel("Number of realizations")
axd["hist"].legend()
<matplotlib.legend.Legend at 0x7d7f58838a50>

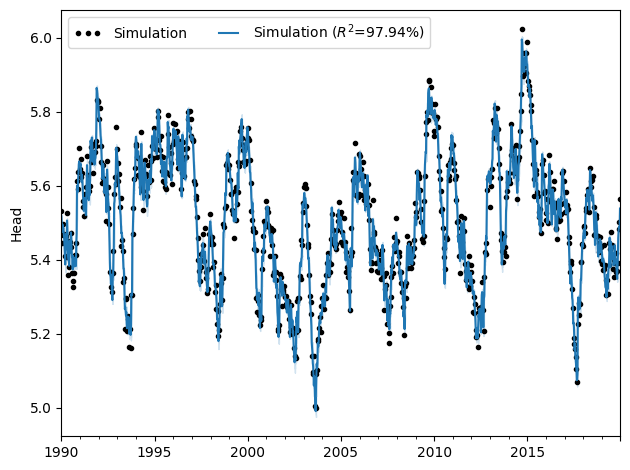
Also looking at the fit of the realizations that did converge; there is a fraction that is in a local minimum. We can get rid of those.
ax = ml_rml.plot()
simulations_rml = ml_rml.solver.simulation_ensemble.loc[:, convergence_rml].loc[
:, good_fit_reals
]
ax.fill_between(
simulations_rml.index,
simulations_rml.quantile(0.025, axis=1),
simulations_rml.quantile(0.975, axis=1),
alpha=0.2,
color="C0",
)
<matplotlib.collections.FillBetweenPolyCollection at 0x7d7f58618050>
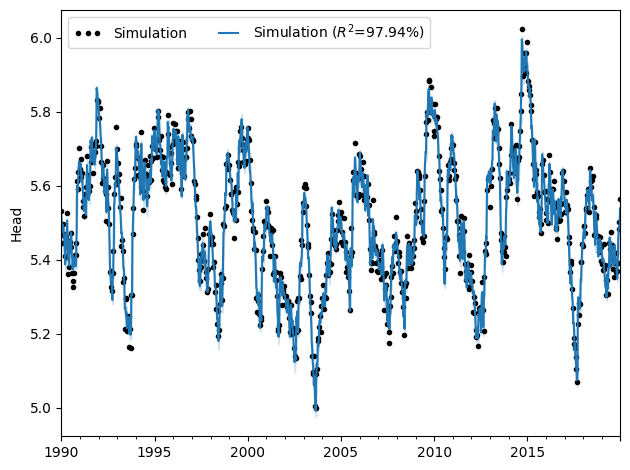
Confidence interval is fairly small as is to be expected.
RML with empirical jacobian
There is also an option to try the randomized maximum likelihood solver with the emperical jacobian. Here the jacobian is computed from the parameter ensemble and the simulation ensemble. This method is still a bit experimental because the parameter update is done without lambda searching and lambda is just guessed via lambda = 1e-7 * max(diag(J.T@J)). Also there is no stopping criteria so the number of optimization steps has to be chosen by hand (noptmax).
# test empirical jacobian
ml_rml_em = get_model(head)
solver = RandomizedMaximumLikelihoodSolver(
num_reals=250,
jacobian_method="empirical",
noptmax=100,
tol=1e-8,
)
ml_rml_em.add_solver(solver)
ml_rml_em.solver.initialize(standard_deviation=noise_std, method="norm")
ml_rml_em.solve(report=True, initialize=False)
DEBUG:pastas.model:[Errno -25] Unknown error -25
RML looping over noptmax: 37%|███▋ | 37/100 [01:21<02:18, 2.19s/it]
Fit report synthetic_model Fit Statistics
================================================================
nfev 37 EVP 97.94
nobs 783 R2 0.98
noise False RMSE 0.03
tmin 1990-01-02 00:00:00 AICc -5762.15
tmax 2019-12-24 00:00:00 BIC -5738.91
freq D Obj 0.03
freq_obs None ___
warmup 3650 days 00:00:00 Interp. No
solver RandomizedMaximumLikelihoodSolverweights Yes
Parameters (5 optimized)
================================================================
optimal initial vary
rch_A 0.500026 0.146585 True
rch_n 1.097864 1.000000 True
rch_a 251.028050 100.000000 True
rch_f -0.807683 -1.000000 True
constant_d 5.008110 5.505771 True
ml_rml.parameters
| initial | pmin | pmax | vary | name | dist | stderr | optimal | |
|---|---|---|---|---|---|---|---|---|
| rch_A | 0.146585 | 0.000010 | 14.658474 | True | rch | uniform | 0.076473 | 0.499872 |
| rch_n | 1.000000 | 0.100000 | 5.000000 | True | rch | uniform | 0.079312 | 1.098125 |
| rch_a | 100.000000 | 0.010000 | 10000.000000 | True | rch | uniform | 38.796115 | 250.822144 |
| rch_f | -1.000000 | -2.000000 | 0.000000 | True | rch | uniform | 0.183148 | -0.807632 |
| constant_d | 5.505771 | 4.805792 | 6.205749 | True | constant | uniform | 0.077206 | 5.008213 |
axes = ml_rml_em.solver.parameter_ensemble_posterior.hist(bins=20, color="C1")
for i, ax in enumerate(axes.ravel()[:-1]):
ml_rml_em.solver.parameter_ensemble_prior.iloc[:, [i]].hist(
bins=20, ax=ax, zorder=0, color="C0"
)
axes[0, 0].legend(["Posterior", "Prior"])
plt.tight_layout()
objfuncs_rml_em = ml_rml_em.solver.obj_func_ensemble.unstack().loc[convergence_rml].T
min_per_real_em = (
ml_rml_em.solver.obj_func_ensemble.groupby("real").min().loc[convergence_rml]
)
f, axd = plt.subplot_mosaic(
[["iter", "hist"]], figsize=(7.0, 3.0), layout="tight", width_ratios=[1.6, 1]
)
axd["iter"].plot(
objfuncs_rml_em.index, objfuncs_rml_em.values, "-", color="k", alpha=0.3
)
axd["iter"].semilogy()
axd["iter"].set_xlabel("Iteration")
axd["iter"].set_ylabel("Objective Function Value")
_ = axd["hist"].hist(min_per_real_em, bins=50, color="k", label="All reals")
axd["hist"].set_xlabel("Minimum Objective\nFunction Value")
axd["hist"].set_ylabel("Number of realizations")
axd["hist"].legend()
<matplotlib.legend.Legend at 0x7d7f5b744410>
simulations_rml_em = ml_rml_em.solver.simulation_ensemble
ax = ml_rml_em.plot()
ax.fill_between(
simulations_rml_em.index,
simulations_rml_em.quantile(0.025, axis=1),
simulations_rml_em.quantile(0.975, axis=1),
alpha=0.2,
color="C0",
)
<matplotlib.collections.FillBetweenPolyCollection at 0x7d7f584f2fd0>
Compare CI
Lets compare the confidence for the different solvers. It can be clearly seen that the confidnece intervalls are fairly similar for the three different solvers. For the emperical jacobian there are some bigger differences that are observed but pretty much negligable.
ls_ci = pd.DataFrame(
[
ml_ls.parameters["optimal"] - 1.96 * ml_ls.parameters["stderr"],
ml_ls.parameters["optimal"],
ml_ls.parameters["optimal"] + 1.96 * ml_ls.parameters["stderr"],
],
index=[0.025, 0.5, 0.975],
)
rml_ci = (
ml_rml.solver.parameter_ensemble_posterior.loc[(convergence_rml, slice(None)), :]
.loc[good_fit_reals]
.quantile([0.025, 0.5, 0.975])
)
rmlem_ci = ml_rml_em.solver.parameter_ensemble_posterior.quantile([0.025, 0.5, 0.975])
df = pd.concat([ls_ci, rml_ci, rmlem_ci], keys=["LS", "RML-2P", "RML-EM"], axis=1).T
df.swaplevel(0, 1).sort_index().T.round(3)
| constant_d | rch_A | rch_a | rch_f | rch_n | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| LS | RML-2P | RML-EM | LS | RML-2P | RML-EM | LS | RML-2P | RML-EM | LS | RML-2P | RML-EM | LS | RML-2P | RML-EM | |
| 0.025 | 4.990 | 4.989 | 4.990 | 0.492 | 0.492 | 0.493 | 242.486 | 242.457 | 243.739 | -0.823 | -0.820 | -0.821 | 1.083 | 1.081 | 1.081 |
| 0.500 | 5.008 | 5.008 | 5.008 | 0.500 | 0.500 | 0.500 | 250.819 | 250.704 | 250.980 | -0.808 | -0.807 | -0.807 | 1.098 | 1.098 | 1.098 |
| 0.975 | 5.026 | 5.023 | 5.023 | 0.508 | 0.508 | 0.508 | 259.152 | 259.591 | 259.420 | -0.792 | -0.791 | -0.791 | 1.113 | 1.113 | 1.112 |
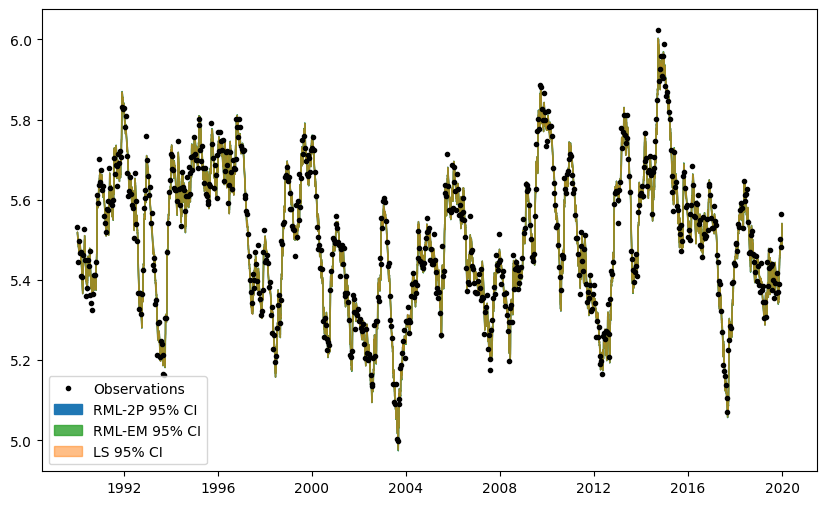
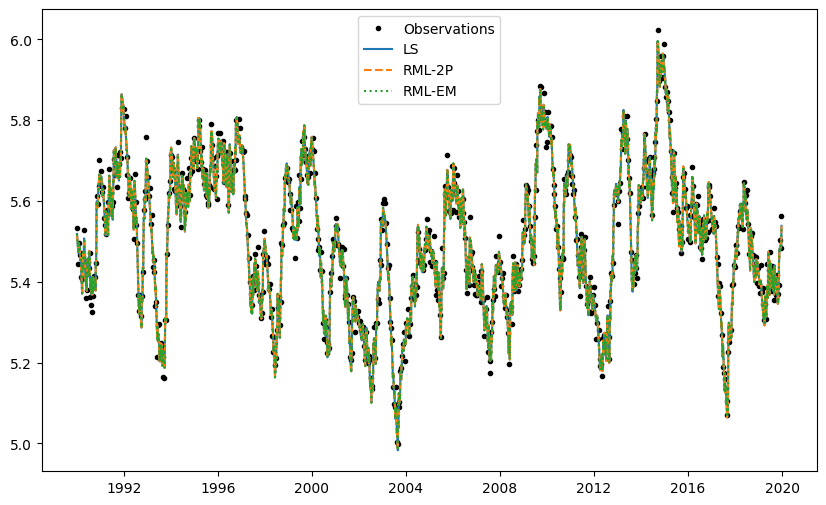
Simulations and confidence intervals in figures also all overlap.
f, ax = plt.subplots(figsize=(10, 6))
ax.plot(
ml_ls.observations(), label="Observations", color="k", linestyle="None", marker="."
)
ax.plot(ml_ls.simulate(), color="C0", linestyle="-", label="LS")
ax.plot(ml_rml.simulate(), color="C1", linestyle="--", label="RML-2P")
ax.plot(ml_rml_em.simulate(), color="C2", linestyle=":", label="RML-EM")
ax.legend()
<matplotlib.legend.Legend at 0x7d7f584e2990>
f, ax = plt.subplots(figsize=(10, 6))
ax.plot(
ml_ls.observations(), label="Observations", color="k", linestyle="None", marker="."
)
ax.fill_between(
simulations_rml.index,
simulations_rml.quantile(0.025, axis=1),
simulations_rml.quantile(0.975, axis=1),
alpha=1.0,
color="C0",
label="RML-2P 95% CI",
)
ax.fill_between(
simulations_rml_em.index,
simulations_rml_em.quantile(0.025, axis=1),
simulations_rml_em.quantile(0.975, axis=1),
alpha=0.8,
color="C2",
label="RML-EM 95% CI",
)
ci = ml_ls.solver.ci_simulation(n=100)
ax.fill_between(
ci.index, ci.iloc[:, 0], ci.iloc[:, 1], color="C1", label="LS 95% CI", alpha=0.5
)
ax.legend()
<matplotlib.legend.Legend at 0x7d7f0d203750>